Эксперты рассказали о подробностях использования роботов во время ликвидации последствий аварии в Чернобыле. Роль машин была чрезвычайно важной. Первыми аппаратами были изделия из ФРГ под названием MF-2 и MF-3. Они сразу сломались из-за радиационного облучения. Тогда же задание создать работа для ликвидации получили советские инженеры.
Новый комплекс был назван «Гамма». В его состав должно было быть пару роботов для разных целей. Предполагался разведчик для подробного анализа территории и точного выяснения радиационной обстановки. Далее в работу должен был включаться робот-подборщик. Именно этот аппарат обязан бы был проводить сбор объектов и их дальнейшую погрузку на транспортный модуль.
Чтобы создать подходящих роботов в Чернобыль приезжали целые группы инженеров. Они жили на расстоянии пары десятков километров от РАЭС. На разрушенную станцию привезли аппарат РР-1. С его помощью проводился замер радиации. Такой робот за пару дней провел полноценное обследование машинного зала 3 энергоблока и часть четвертого. Аппарат смог проработать в местах с уровнем радиации в 18 000 Р/ч.
Роботы с небольшой массой перевозились на место силами самих операторов. При этом, на крыши аппараты спускали из вертолетов. В дальнейшем режим использования роботов был изменен. На РАЭС, прежде всего, требовалось очищать обширные площади от радиоактивного мусора. В итоге созданы были роботы-бульдозеры. Их начали сразу направлять в Чернобыль. Контроль над ними проходил на расстоянии. Для этого мог использоваться как кабель, так и радиосвязь. В ходе работ выявлялись все недостатки в виде ускоренного расхода аккумуляторов. Была также плохая радиосвязь из-за повышенной радиации.
Индексом ТР-А1 был назван робот-бульдозер. Он был задействован для очищения 1500 кв. м кровли. Его общее время работы превысило 200 ч. На улучшенную модификацию ТР-Б1 поставили, вместо аккумуляторов, генератор. Объема его бака на 15 л полностью хватало на 8 час работы в автономном режиме. У аппаратов ТР-Г1 и ТР-Г2 была улучшенная проходимость и защита от радиации.

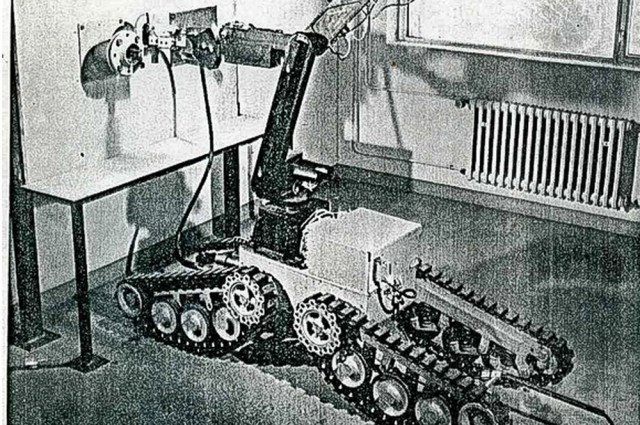
Полупроводники выходили из строя из-за радиации. Из-за этого в ключевых механизмах работали релейные схемы. Роботы РР-Г1 и РР-Г2 для надежности передвижения снабдили гусеничными платформами. Скорость роботов была 0,3 м/с.